
SLAM (Simultaneous Localization and Mapping) is among the vital strategies utilized in robotics and pc imaginative and prescient. It helps machines perceive the place they’re and create a map of their environment. Movement-blurred pictures face difficulties in dense visible SLAM techniques for 2 causes: 1) Inaccurate pose estimation throughout monitoring: Present photo-realistic dense visible SLAM algorithms depend on clear pictures to estimate digital camera positions by making certain constant brightness throughout views. This impacts the mapping course of, resulting in inconsistent multi-view geometry. 2) Inconsistent multi-view geometry in mapping: Poor picture high quality from numerous views could result in incorrect options, which trigger errors in 3D geometry and a low-quality reconstruction of the 3D map. Combining these two elements, present dense digital SLAM techniques would often carry out poorly when dealing with motion-blurred pictures.
Conventional sparse SLAM strategies use sparse level clouds for map reconstruction. Latest learning-based dense SLAM techniques deal with producing dense maps vital for downstream duties. Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS) have been used with SLAM techniques to create real looking 3D scenes, bettering map high quality and texture. Nonetheless, present strategies closely depend on high-quality, sharp RGB-D inputs, which pose challenges when coping with motion-blurred frames, typically encountered in low-light or long-exposure situations, which end in low precision and effectivity of localization and mapping in numerous strategies.
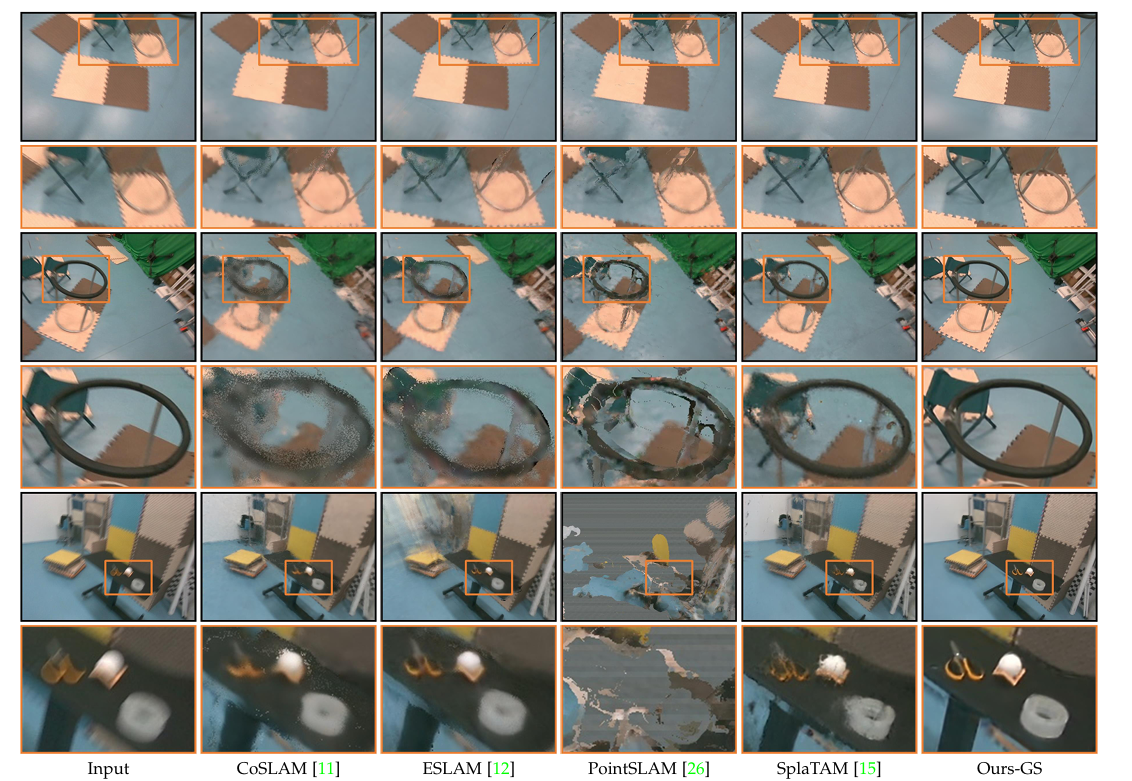
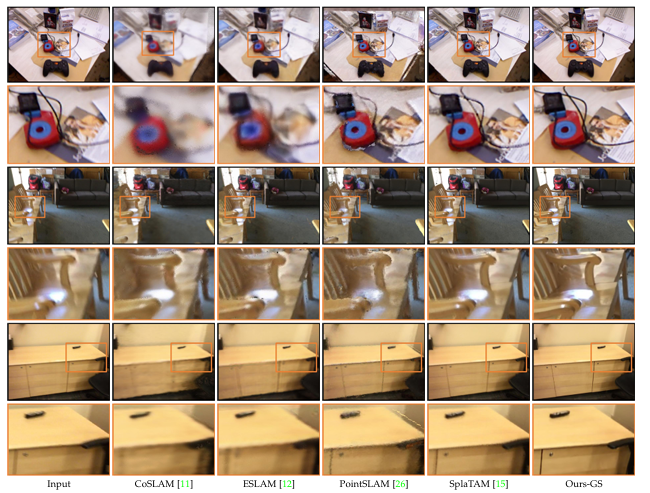
To resolve these issues, a gaggle of researchers from China carried out detailed analysis and proposed MBA-SLAM, a photo-realistic dense RGB-D SLAM pipeline designed to deal with motion-blurred inputs successfully. This method integrates the bodily movement blur imaging course of into the monitoring and mapping levels. The principle goal of this framework is to reconstruct high-quality, dense 3D scenes and precisely measure digital camera movement trajectories, which was achieved by integrating two key parts: a movement blur-aware tracker and a bundle-adjusted deblur mapper based mostly on NeRF or 3D Gaussian Splatting.
The strategy used a steady movement mannequin to trace the digital camera’s motion throughout publicity. The system thought-about the digital camera’s begin and finish positions for every motion-blurred picture. In monitoring, a pointy reference picture was rendered, blurred to match the present picture, and in contrast to enhance the movement estimate. The digital camera trajectories and 3D scenes have been optimized in mapping to scale back image-matching errors. Two scene representations have been explored: implicit neural radiance fields (NeRF) and express 3D Gaussian Splatting (3D-GS). NeRF achieved larger body charges however decrease rendering high quality, whereas 3D-GS provided higher high quality at the price of decrease body charges.
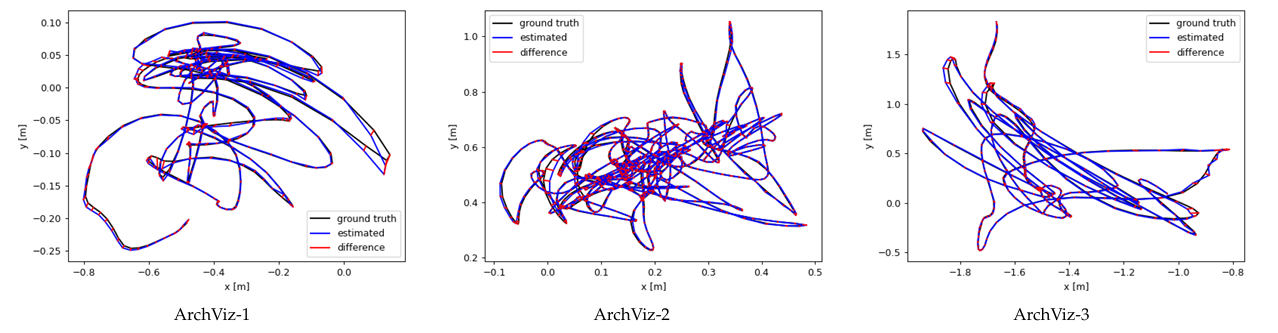
The strategy confirmed a measure discount in monitoring errors, with the ScanNet dataset yielding an ATE RMSE of 0.053, outperforming ORB-SLAM3 (0.081) and LDS-SLAM (0.071). On the TUM RGB-D dataset, MBA-SLAM achieved an ATE RMSE of 0.062, exhibiting its superior monitoring precision. In picture reconstruction, MBA-SLAM excelled with a PSNR of 31.2 dB on the ArchViz dataset and an SSIM of 0.96 on ScanNet, outperforming strategies like ORB-SLAM3 and DSO when it comes to high quality. The LPIPS rating of MBA-SLAM can also be reported to be 0.18, which displays higher perceptual high quality. Radiance fields and Gaussian splatting improved picture high quality, whereas CUDA acceleration enabled real-time processing, making it 5 instances sooner than others. MBA SLAM supplied improved accuracy in monitoring, higher picture high quality, and velocity in comparison with others, and it appeared to vow an utility in SLAM situations with movement blur as a consequence of dynamism within the surroundings.
In abstract, the proposed framework MBA-SLAM successfully addresses issues within the SLAM system. With its bodily movement blur picture formation mannequin, extremely CUDA-optimized blur-aware tracker, and deblurring mapper, the MBA-SLAM tracked correct digital camera movement trajectories inside publicity time and reconstructed a pointy and photo-realistic map for the given video sequence enter. It carried out significantly better than the earlier strategies on present and real-world datasets. This work marks a major improvement within the subject of SLAM techniques and can be utilized as a baseline for future development and analysis!
Take a look at the Paper and GitHub. All credit score for this analysis goes to the researchers of this challenge. Additionally, don’t overlook to comply with us on Twitter and be a part of our Telegram Channel and LinkedIn Group. For those who like our work, you’ll love our e-newsletter.. Don’t Neglect to hitch our 55k+ ML SubReddit.
Divyesh is a consulting intern at Marktechpost. He’s pursuing a BTech in Agricultural and Meals Engineering from the Indian Institute of Know-how, Kharagpur. He’s a Knowledge Science and Machine studying fanatic who needs to combine these main applied sciences into the agricultural area and resolve challenges.

{kind=link}