
By Kristýna Janovská and Pavel Surynek
Think about if all of our automobiles may drive themselves – autonomous driving is turning into potential, however to what extent? To get a car someplace by itself might not appear so difficult if the route is evident and properly outlined, however what if there are extra automobiles, every making an attempt to get to a distinct place? And what if we add pedestrians, animals and different unaccounted for components? This downside has not too long ago been more and more studied, and already utilized in situations resembling warehouse logistics, the place a bunch of robots transfer packing containers in a warehouse, every with its personal aim, however all shifting whereas ensuring to not collide and making their routes – paths – as quick as potential. However the way to formalize such an issue? The reply is MAPF – multi-agent path discovering [Silver, 2005].
Multi-agent path discovering describes an issue the place now we have a bunch of brokers – robots, autos and even folks – who’re every making an attempt to get from their beginning positions to their aim positions suddenly with out ever colliding (being in the identical place on the similar time).
Sometimes, this downside has been solved on graphs. Graphs are constructions which might be capable of simplify an atmosphere utilizing its focal factors and interconnections between them. These factors are known as vertices and may signify, for instance, coordinates. They’re related by edges, which join neighbouring vertices and signify distances between them.
If nevertheless we try to resolve a real-life state of affairs, we attempt to get as near simulating actuality as potential. Subsequently, discrete illustration (utilizing a finite variety of vertices) might not suffice. However the way to search an atmosphere that’s steady, that’s, one the place there’s mainly an infinite quantity of vertices related by edges of infinitely small sizes?
That is the place one thing known as sampling-based algorithms comes into play. Algorithms resembling RRT* [Karaman and Frazzoli, 2011], which we utilized in our work, randomly choose (pattern) coordinates in our coordinate area and use them as vertices. The extra factors which might be sampled, the extra correct the illustration of the atmosphere is. These vertices are related to that of their nearest neighbours which minimizes the size of the trail from the place to begin to the newly sampled level. The trail is a sequence of vertices, measured as a sum of the lengths of edges between them.
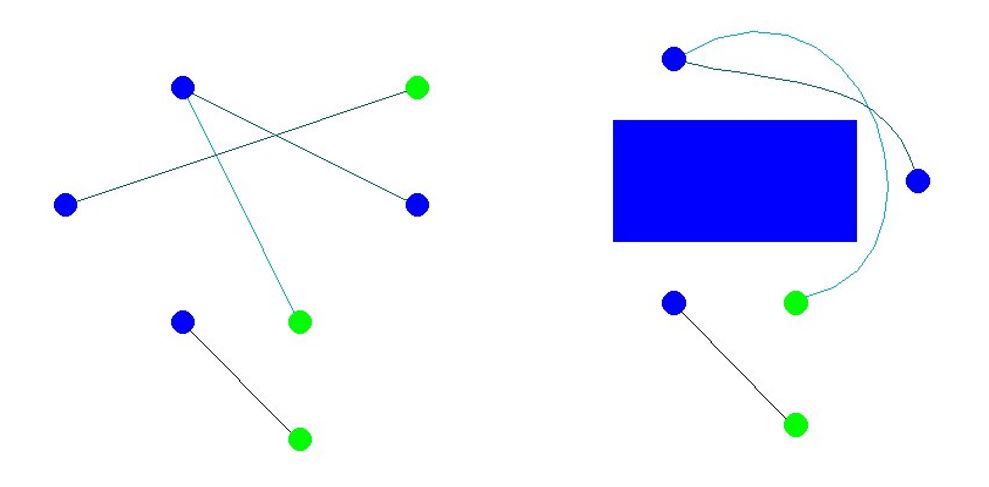 Determine 1: Two examples of paths connecting beginning positions (blue) and aim positions (inexperienced) of three brokers. As soon as an impediment is current, brokers plan clean curved paths round it, efficiently avoiding each the impediment and one another.
Determine 1: Two examples of paths connecting beginning positions (blue) and aim positions (inexperienced) of three brokers. As soon as an impediment is current, brokers plan clean curved paths round it, efficiently avoiding each the impediment and one another.
We will get a near optimum path this manner, although there’s nonetheless one downside. Paths created this manner are nonetheless considerably bumpy, because the transition between totally different segments of a path is sharp. If a car was to take this path, it will in all probability have to show itself without delay when it reaches the tip of a section, as some robotic vacuum cleaners do when shifting round. This slows the car or a robotic down considerably. A approach we will remedy that is to take these paths and clean them, in order that the transitions are now not sharp, however clean curves. This manner, robots or autos shifting on them can easily journey with out ever stopping or slowing down considerably when in want of a flip.
Our paper [Janovská and Surynek, 2024] proposed a technique for multi-agent path discovering in steady environments, the place brokers transfer on units of clean paths with out colliding. Our algorithm is impressed by the Battle Based mostly Search (CBS) [Sharon et al., 2014]. Our extension right into a steady area known as Steady-Atmosphere Battle-Based mostly Search (CE-CBS) works on two ranges:
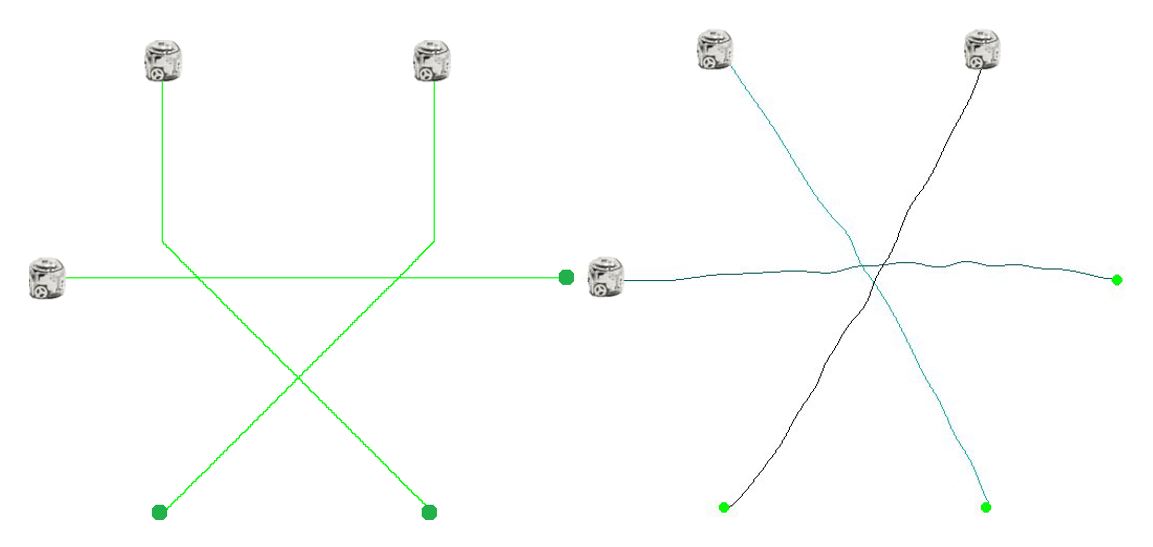 Determine 2: Comparability of paths discovered with discrete CBS algorithm on a 2D grid (left) and CE-CBS paths in a steady model of the identical atmosphere. Three brokers transfer from blue beginning factors to inexperienced aim factors. These experiments are carried out within the Robotic Brokers Laboratory at School of Info Expertise of the Czech Technical College in Prague.
Determine 2: Comparability of paths discovered with discrete CBS algorithm on a 2D grid (left) and CE-CBS paths in a steady model of the identical atmosphere. Three brokers transfer from blue beginning factors to inexperienced aim factors. These experiments are carried out within the Robotic Brokers Laboratory at School of Info Expertise of the Czech Technical College in Prague.
Firstly, every agent searches for a path individually. That is carried out with the RRT* algorithm as talked about above. The ensuing path is then smoothed utilizing B-spline curves, polynomial piecewise curves utilized to vertices of the trail. This removes sharp turns and makes the trail simpler to traverse for a bodily agent.
Particular person paths are then despatched to the upper degree of the algorithm, through which paths are in contrast and conflicts are discovered. Battle arises if two brokers (that are represented as inflexible round our bodies) overlap at any given time. If that’s the case, constraints are created to forbid one of many brokers from passing by way of the conflicting area at a time interval throughout which it was beforehand current in that area. Each choices which constrain one of many brokers are tried – a tree of potential constraint settings and their options is constructed and expanded upon with every battle discovered. When a brand new constraint is added, this data passes to all brokers it considerations and their paths are re-planned in order that they keep away from the constrained time and area. Then the paths are checked once more for validity, and this repeats till a conflict-free resolution, which goals to be as quick as potential is discovered.
This manner, brokers can successfully transfer with out dropping velocity whereas turning and with out colliding with one another. Though there are environments resembling slim hallways the place slowing down and even stopping could also be obligatory for brokers to soundly cross, CE-CBS finds options in most environments.
This analysis is supported by the Czech Science Basis, 22-31346S.
You possibly can learn our paper right here.
References
- Janovská, Okay. and Surynek, P. (2024). Multi-agent Path Discovering in Steady Atmosphere, CoRR.
- Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R. (2014). Battle-based seek for optimum multi-agent pathfinding, Synthetic Intelligence.
- Karaman, S. and Frazzoli, E. (2011). Sampling-based algorithms for optimum movement planning, CoRR.
- Piegl, L. and Tiller, W. (1996). The NURBS E book, Springer-Verlag, New York, USA, second version.
- Silver, D. (2005). Cooperative pathfinding, Proceedings of the First Synthetic Intelligence and Interactive Digital Leisure Convention, Marina del Rey, California, USA.

AIhub
is a non-profit devoted to connecting the AI neighborhood to the general public by offering free, high-quality data in AI.
AIhub
is a non-profit devoted to connecting the AI neighborhood to the general public by offering free, high-quality data in AI.

{kind=link}